


2025年12月19日
在智慧城市与智能建造加速发展的背景下,西交利物浦大学设计学院持续推动科研成果向工程实践转化。近日,由西浦土木工程系助理教授唐舒博士带领的科研团队,与中建八局华南建设有限公司联合研发的“工地多模态感知巡检体系”荣获江苏省数字经济学会优秀成果奖三等奖。

该成果以四足机器人为核心载体,融合多模态感知、智能导航、计算机视觉与环境监测等技术,为工程建设与建筑运维中的安全管理与智能巡检提供了创新解决方案。项目目前已在实际工程场景中落地应用,展现出良好的稳定性与实用价值。
此次获奖不仅体现了西浦在智能建造、机器人技术与人工智能等方向的科研实力,也彰显了学校在产学研深度融合方面的持续探索。项目的研发与实施为相关专业师生提供了真实工程场景下的实践平台和研究案例,进一步推动了多学科交叉协同创新。
唐舒博士介绍道,该巡检体系主要有三个关键技术亮点,包括融合感知与智能导航、计算机视觉驱动的安全识别、模块化拓展与跨学科应用。
“在融合感知与智能导航方面,它实现了终端设备与云端系统的协同运行,使巡检任务能够进行远程监管与实时干预,体现了物联网与边缘计算技术在工程智能系统中的实际应用潜力。
“在安全管理方面,系统引入先进的计算机视觉模型,对施工现场画面进行实时分析,可以自动识别不规范施工行为及潜在安全隐患,为工程安全管理相关教学与科研提供了直观且可落地的应用案例。
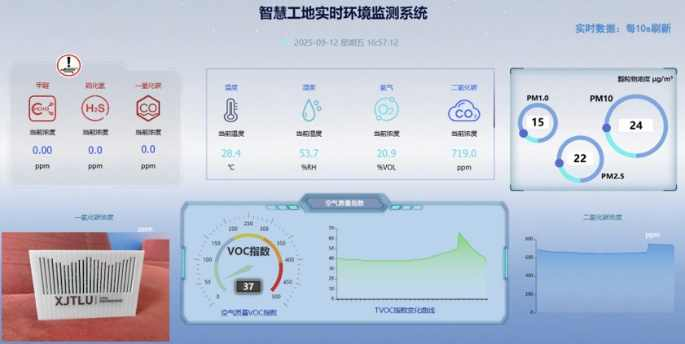
“同时,通过集成气体监测模块与高精度激光雷达,系统实现了环境指标的实时监测与三维点云数据采集。其模块化、可拓展的设计为不同学科研究人员开展跨领域协作研究提供了开放平台,进一步推动了多学科交叉融合。”她说。
未来,学校将继续深化与行业伙伴的合作,通过产学研融合推动更多面向真实需求的技术创新,为建设更加安全、高效、智能的未来城市贡献力量。
(供稿、图片提供:土木工程系 编辑:钱懿)
2025年12月19日