当虚拟现实技术遇到无人车:西浦研究人员提出远程人车交互技术新方案
2023年04月17日
西交利物浦大学、伦敦国王学院和英属哥伦比亚大学联合研究团队将虚拟现实中常用的微缩世界技术创新地应用于远程实时操作无人车上,令远程人车交互更为自然。有关该技术的论文获第十八届国际虚拟现实持续发展和产业应用会议最佳论文奖。

远程人车交互最常见的使用场景之一是无人车搜救。这是一种新型的搜救方式,操作员只需根据车辆上方的无人机实时传回的全景画面操作地面无人车,就可以对地形进行直观探索。
在地势复杂、人员行动及设备运输不便的情况下,传统救援往往难以展开工作;此时,无人车搜救这种将空中与地面的画面联动起来的新方法,更容易进行大范围无死角搜索,十分灵活高效。
然而传统的无人车操控方法也有其局限性。目前常见的操控方法是根据无人机传回的俯视图,使用两个操纵杆旋转和平移无人车。但是,由于相机的视角不会随着无人车运动的方向移动,这常给操作员带来困扰,例如当无人车向下移动时,部分操作者会难以分清左右方向。
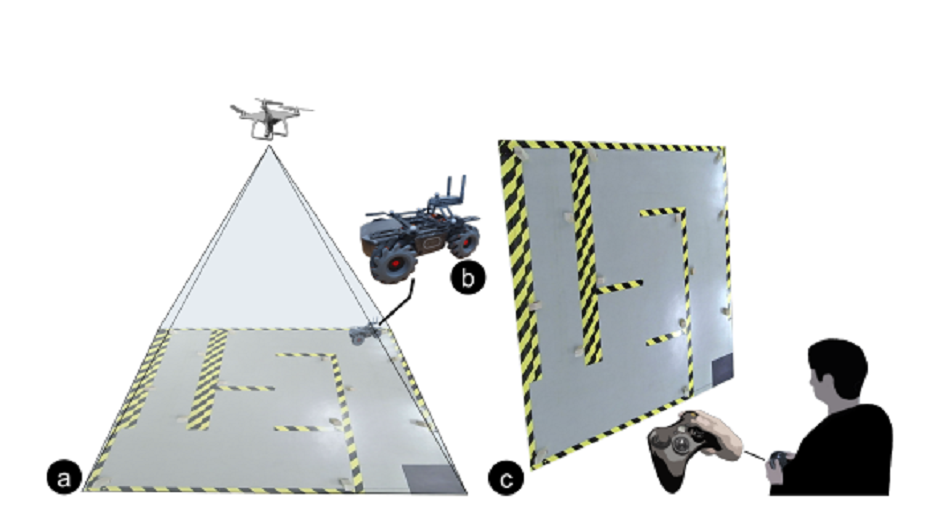
(图片说明:使用传统方法,用手柄控制无人车移动)
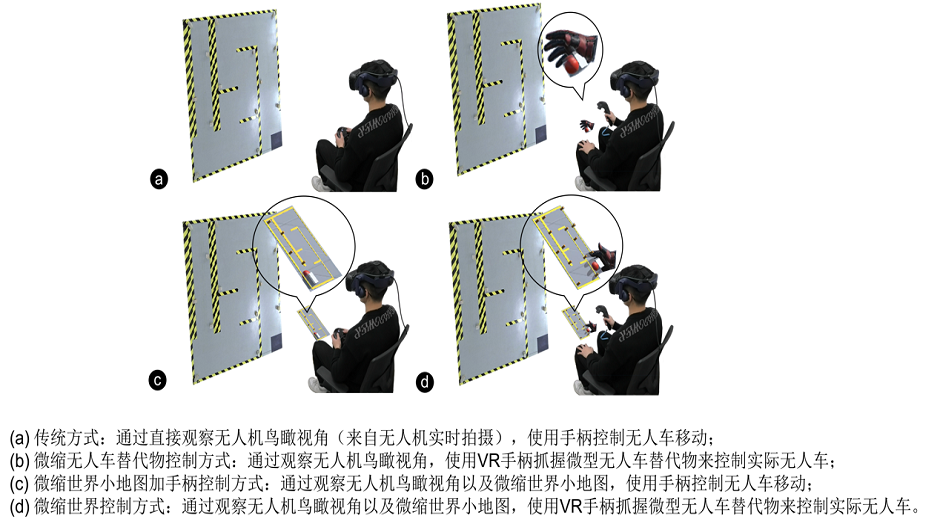
针对以上问题,西交利物浦大学智能工程学院的博士生团队以及伦敦国王学院和英属哥伦比亚大学的研究团队将常用于虚拟现实中的微缩世界技术,创新地应用在远程实时操作无人车上。该技术将无人车行驶的真实环境缩小并映射给操作员,让操作员在虚拟世界里直接通过手部抓握快速移动、旋转无人车的替代物,直接控制现实世界里的无人车,让它快速移动到达指定地点。
据论文的第一作者、西浦博士生罗亦鸣介绍,人机协同是目前国内外重点关注的领域,而他们的研究目标正是开发一个用户友好的操作界面,更加方便、精准地远程控制无人车,让机器更好地服务于人。
“远程操控机器人领域的痛点之一是信号传输,例如信号延迟等问题。随着通讯技术的成熟,这些问题正在被解决。然而远程操控的界面设计却仍处于初期研究阶段,在日渐提高的通讯技术和硬件条件下逐渐成为需要重点提升的领域。提高人机交互的体验、效率是我们这次重点研究的问题。”他解释道。
“一个想法实现的过程中有很多变数,每一个步骤都需要我们仔细分析,一一排查、尝试,这让我们积累了很多实操经验。”论文的第二作者、西浦博士生王佳林表示,“我们非常希望这项技术以后能有更广泛的应用,在搜救、农业测量以及娱乐拍摄等领域提供更多便利。”

(图片说明;博士生罗亦鸣和王佳林)
罗亦鸣和王佳林是西浦智能工程学院计算机系梁海宁教授和潘昱杉博士共同执导的博士生。
“实验结果表明,我们团队设计的界面让用户在俯视视角下控制无人车更加灵活、精准。这也为国内外同行在研究人机自然协同、远程控制等方面提供了独特的见解。”潘昱杉博士表示。
“我们的博士生通过跨学科研究,运用机器人、远程操控、虚拟现实等学科的交叉印证,证实了无人车的远程控制不能仅依靠传统的计算机显示器显示信息和键盘、鼠标或操纵杆来控制车身,引入微缩世界技术可以使远程人车交互更加自然。”梁海宁教授总结道,“这项研究为远程操控无人车以及无人车行业提供了有意义的科研贡献。”
(记者:金画恬 编辑:寇博 石露芸)
2023年04月17日