


打破专业壁垒!西浦学子玩转无人船!
2025年09月26日
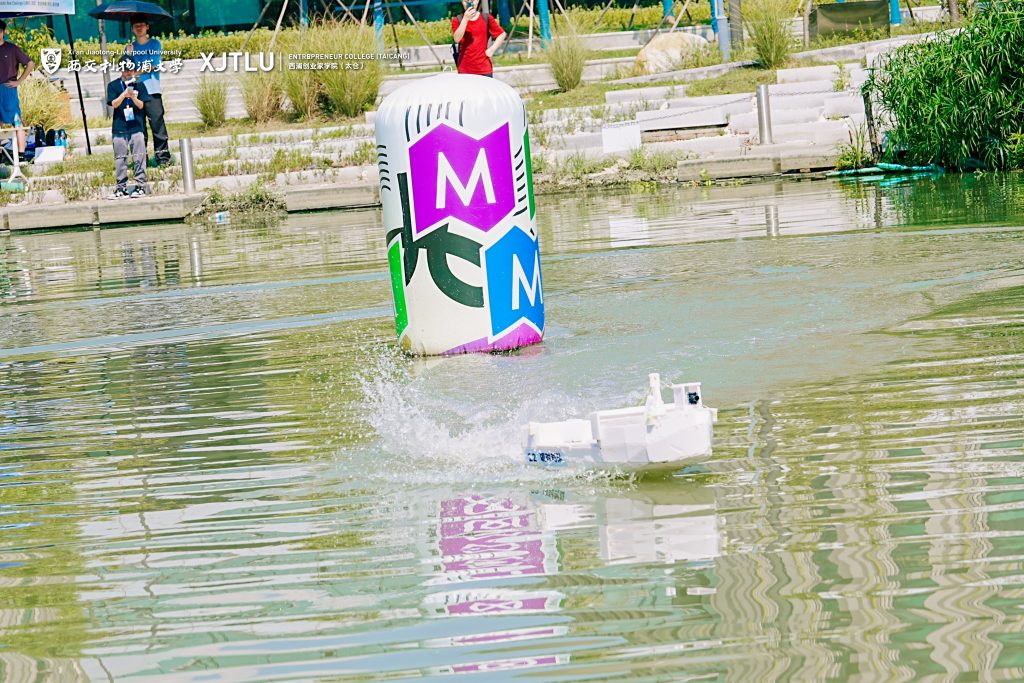
一艘艘各式各样的小船在灼热的阳光下划开了西浦创业家学院(太仓)校园内朱泾河的水面。这些由学生自主设计、制作、编程的无人船在设定的航道上需要完成竞速、目标识别、避障等综合任务。

无人船竞赛路线图
这是首届西交利物浦大学无人船竞赛,赛事面向西浦全体学生,由学生自由组队参加。比赛任务包含机械电子、计算机科学、机器学习、人工智能等多领域的知识,因此该项赛事特别鼓励跨专业、跨年级协作。比赛当天共有18支有效参赛队伍。竞赛负责老师智能机器人学院江浩川博士介绍,无人船需要精准识别河道浮标上的字母标识,并完成三个赛段路线,考验的是算法精度与机械控制能力。
跨学科组队,从“撞大运”开始
在18支参赛队伍中,一支名为“撞大运”的队伍格外引人注目。不仅因为其鲜红色的船体和调侃般的队名,更因为他们在赛前凌晨仍在实验室紧急救船。

图为“撞大运”队的无人船
“撞大运”队伍由来自机器人工程和数据科学与大数据技术两个本科专业,共五位学生组成。作为团队发起人,机器人工程专业大二的严涵同学在竞赛初期就瞄准无人船所需要的多学科背景。“单靠一个专业很难完成这样一个综合项目。”他说。因此,他没有选择自己的小圈子,而是在学校大群中实践“捞”人计划,清晰列出所需的技术角色。很快就有同学联系上了他。
最终,几位同样对实践充满热情,但专业各异的同学组成了“撞大运”队。其中,两名来自数据科学与大数据技术专业的学生擅长算法与模型,虽然属于软件派,但对硬件和实体控制系统抱有浓厚兴趣。“我一直对能看得见摸得着的项目更感兴趣。”队员金肖杨柯说道。
另外三位来自机器人工程专业的大二学生自然承担起船体与动力控制系统设计与建造的工作。
严涵发出的这条群消息像一张渔网,撒向跨专业的池塘,最终“捞”起了这支目标一致、能力互补的队伍。
24小时接连危机,实战中极限学习
比赛前一天的测试中,“撞大运”队发现小船仍有欠缺。比如,船在行驶时,电机因过热会导致固定其的胶体融化,极易脱落。为了解决这个问题,他们决定增加散热系统。
“我们做了两步改进,一是加装风扇,二是拆除电机上方的顶盖。”队员钱恩贝介绍。通过风扇的物理降温与改善通风,实现散热。
电机散热的问题解决了。然而,危机并没有解除。比赛当天的凌晨,成员们还在实验室里焦急地尝试各种电源接口方案。
“一用电池,系统就工作不了。”金肖杨柯回忆。由于电池为官方统一提供,供电不稳成了全赛场的共性难题。有的队伍选择降低系统功耗,勉强维持基础航行,几乎放弃视觉识别功能。有的队伍反复调试后仍然无法稳定控制而无奈止步赛前。在几乎准备放弃的时候,江浩川老师鼓励他们坚持到底:“遇到问题就解决问题。”
比赛迫在眉睫。团队连夜购入了四种转换接头逐一测试,最终通过带PD芯片的USB-Type C转DC5525的转换头,搭配支持PD协议的充电宝,临时解决了供电问题。

作为机器人工程专业的大二新生,钱恩贝在九月刚踏入西浦创业家学院(太仓)的校园。在分享船体建造时,他坦言:“第一次入水测试时,我们意识到最开始设计的船体,一进水可能就会沉没。当时设计的模型结构强度不足以支撑水浪。”他们一开始都低估了无人船硬件实现的复杂程度。“硬件一旦出错,就只能重来。”钱恩贝说。
金肖杨柯是数据科学与大数据技术专业的大四生,他原本认为“算法写得好,识别就没问题”,直到他们面临电池供电不稳的难题。虽然最后困难得以解决,金肖杨柯表示:“如果早点测试,就能早发现早解决。”
无人船不是一个纯算法项目,也不是纯机械模型。钱恩贝与金肖杨柯一致认为,在测试与实操中调整、优化是他们在竞赛中最大的收获。
最终,“撞大运”队获得了第三名的名次和最高检测准确奖。“回看赛前经历,仿佛真的‘撞大运’一般,”队员们调侃道。

“撞大运”队获奖合影
跨领域探索,与模型“较真”
作为电气工程专业的大三学生,赵子涵虽然拥有航模竞赛经验,曾在2019年航模全国锦标赛中获得青少年组个人第二名的成绩,但在AI数据模型领域,他坦言自己完全是零基础。
“无人船竞赛对我来说是一次跨领域探索。”赵子涵说,“我希望突破舒适区。”
在队友的协助下,赵子涵逐步进行了AI模型的训练与优化。团队中负责数据科学的同学帮助他配置深度学习环境,搭建代码框架,为他打下了基础。
然而,当首次测试结果出炉时,赵子涵意识到,直接套用现有开源数据集训练成的AI模型识别误差极大,可用性低。
为此,他反复调整模型参数,在队友的协助下决定将训练数据集高度模拟竞赛环境,并采用数据增强的模型训练方法来提高监测模型的目标检测泛化性。赵子涵与队友在校外的一家水上俱乐部的赛艇项目中划船下水,制作浮标模型并进行拍摄,建立起一个高度贴合真实比赛环境的数据集。
最终,赵子涵完成了模型的重新训练与部署,将识别准确率大幅提升。“如果我训练一个模型,就应当要保证环境参数尽可能与比赛现场一致。”赵子涵表示。这种对细节的把握和对技术的深入理解,让他最终脱颖而出。
试错、迭代、升级
赵子涵分享无人船的设计时,提到一共有三艘原型船。首艘验证制造流程,次艘测试零件装配逻辑,而第三艘无人船至赛前一晚仍在持续优化。
在制作首艘无人船时,赵子涵不断尝试新设计,针对船体运行过程中遇到的困难思考解决方案,进行设计调整。
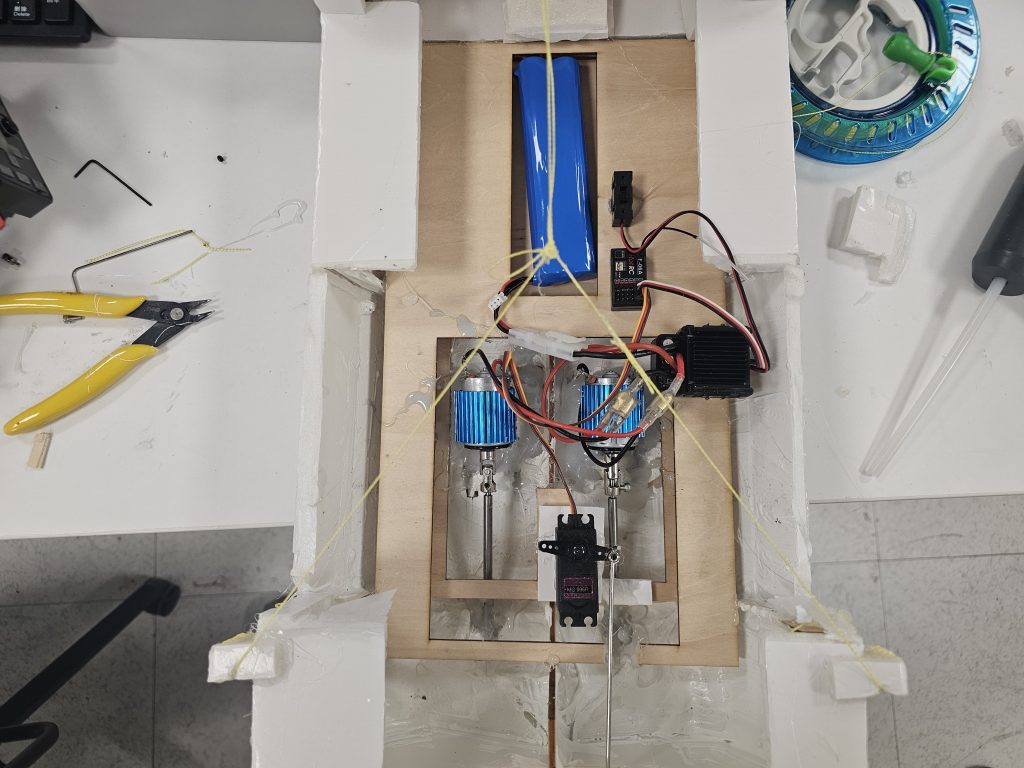
改进装配方式后并增加电机散热的动力系统
比如,为了提高无人船的行驶速度,赵子涵依据流体力学,升级了船首设计,并改善了螺旋桨与传动轴装配位置。通过将原先较为宽的船首更改为V型船首,减小风阻与水阻。
同时,他发现螺旋桨安装于船尾的正后方时,如果高速行驶,船体的上下浮动会导致螺旋桨随船身离开水面,从而造成动力损耗。因此,他对螺旋桨位置进行了调整,将其调整至船尾于水中的正投影下方,保证螺旋桨能够全程置于水面以下,减小传动效率的损失。
第三艘船进一步提升船首抬升角度,以减少与水面的接触,从而实现更高速度。
这艘历经三次迭代的无人船,最终不仅夺得竞赛第一名,也将最快航速奖收入囊中。
赵子涵与智能机器人学院院长合影
充分利用资源,感受真实工程环境
无论是“撞大运”队还是赵子涵,参赛选手们都在竞赛中将15分钟维修时间用到极致,场上调试从未停歇。赵子涵甚至在决赛中仍利用该时间加固松动零件,保证了船只稳定。

“撞大运”队赛时休整船体
竞赛期间,学校为参赛选手提供了系列工作坊和资源支持,包括创新工场的机加工设备、3D打印机、激光切割机等。钱恩贝表示,来自创新工场、智能机器人学院、人工智能与先进计算学院、智造生态学院、芯片学院和物联网学院多学院老师的联合指导,让几乎从零开始的他们得以快速入门。
“我们希望为学生提供一个真实的工程实践环境。通过‘看得见摸得着’的机器人项目,学生能够直观感受技术落地过程,”江浩川老师说,“这正是实践教育的精髓。”
无人船竞赛深入践行了融合式教育理念,打破传统学科壁垒,通过真实、复杂的工程项目,培养学生跨学科解决实际问题的能力、团队协作精神及创新思维。
西浦首席教育官、西浦创业家学院(太仓)领导小组组长张晓军教授强调,融合式教育不仅是知识的整合,更是学习模式、产业需求与教育场景的深度融合。“无人船竞赛这样的项目制学习活动,正是将课堂理论置于真实挑战中,让学生在做中学,成长为具备未来行业竞争力的精英人才。”
(记者:季嘉焱 编辑:寇博 图片提供:赵子涵、金肖杨柯)
2025年09月26日